


Der Anlagentyp SAW (Schwenkarmwäscher) von MTM -
die kompakte und individuelle Lösung für Ihre Reinigungsaufgabe
Aufgabenstellung:Die Realisierung einer prozesssicheren Reinigung und Trocknung diverser Bauteilvarianten aus einer Fertigungs- insel in einer dezentralen und eigenständigen Reinigungsanlage. Dies geschieht ohne ein Umrüsten und ohne die Notwendigkeit einer Veränderung der Fertigungsinseln in Ihrem Aufbau, als integrierte Reinigungsanlage.
Unsere Lösung:
Durch die Erweiterung des bewährten Konzepts der kreisgetakteten Anlagen um einen Schwenkarm, realisiert MTM die prozesssichere Reinigung von diversen Bauteilen in verschiedenen Varianten ohne die Notwendigkeit von Umrüstung in einer Anlage. Es ist die ideale Reinigungsmaschine für Insellösungen. Sie passt bestens in die Prozessfolge direkt nach oder innerhalb der Bearbeitungszyklen von Bauteilen. Des Weiteren ist sie sehr gut für die Beladung via Roboter geeignet und kann ohne großen Aufwand an jede Roboterzelle angebaut werden. EIne gute Handbedienung ist außerdem gewährleistet
Verfahrensablauf:
Die Anlage ist in der Grundausstattung mit einem Nassprogramm und dem Abblasen der Bauteile mit Druckluft oder komprimierter Luft ausgelegt. Als Erweiterung kann ein Spülprozess implementiert werden. Die Prozess- zeiten sowie die Be- und Entladezeiten laufen zeitparallel ab, somit hat man für das Be- und Entladen nahezu die gesamte Taktzeit zur Verfügung. Dadurch wird der Roboter in seinem Prozessablauf durch diese Anlage kaum eingeschränkt.
Vorteile:
- Be- und Entladen an ein und derselben Position
- Die Werkstückträgervorrichtungen sind auswechselbar und können verschiedenen Bauteilen angepasst werden.
- Die Werkstückaufnahmen werden immer im Prozess mitgewaschen.
- Kleine Aufstellfläche - kaum größer als 1 m².

Anwendungsbereiche

ESP-Block

Batteriegehäuse für LKW
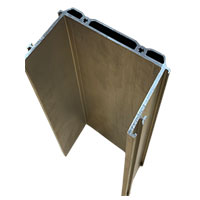
Batteriegehäuse für PKW

Elektromotor
Batteriewannen
Eisenbahnmotor
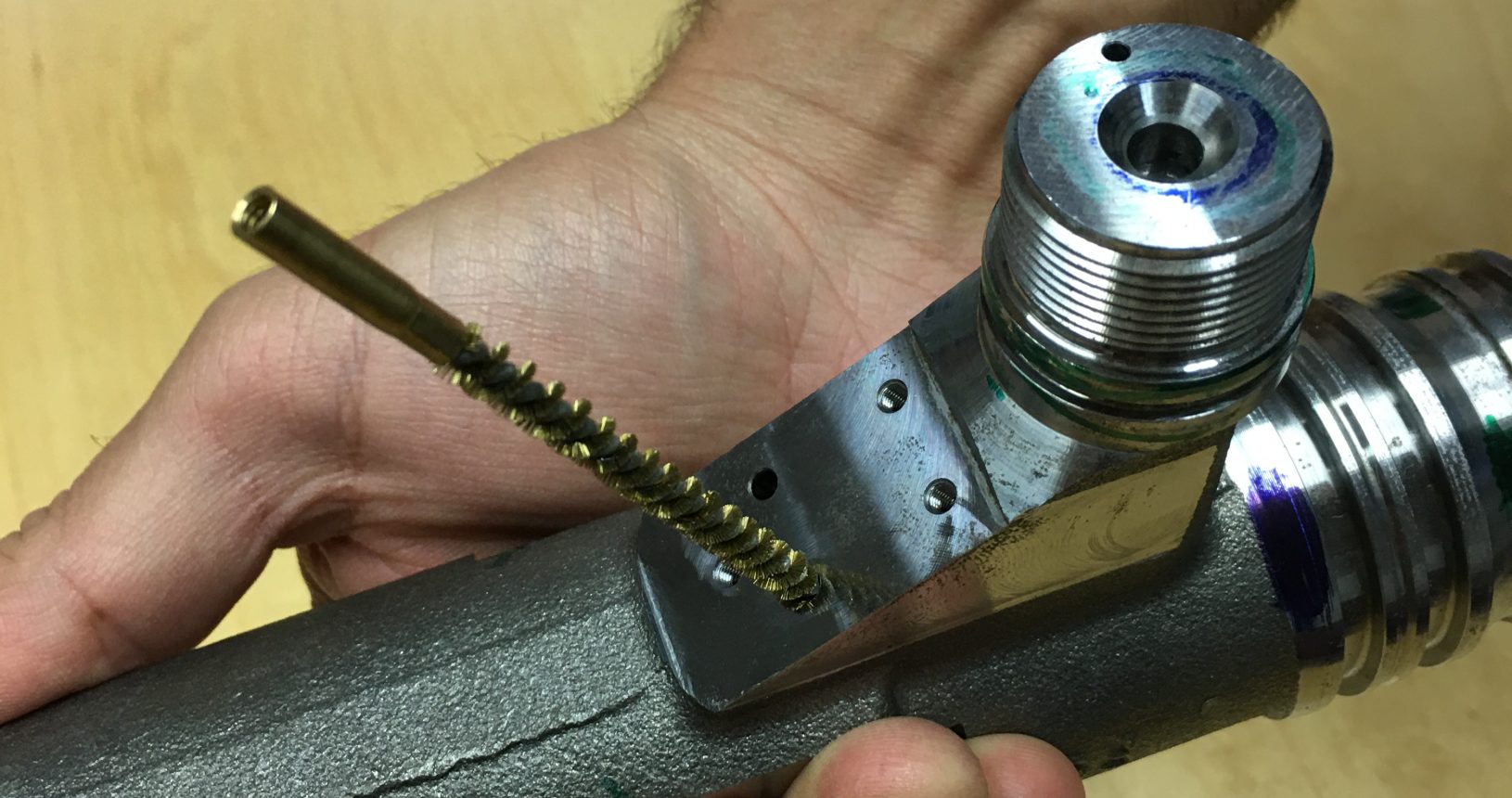
Einspritzdüse
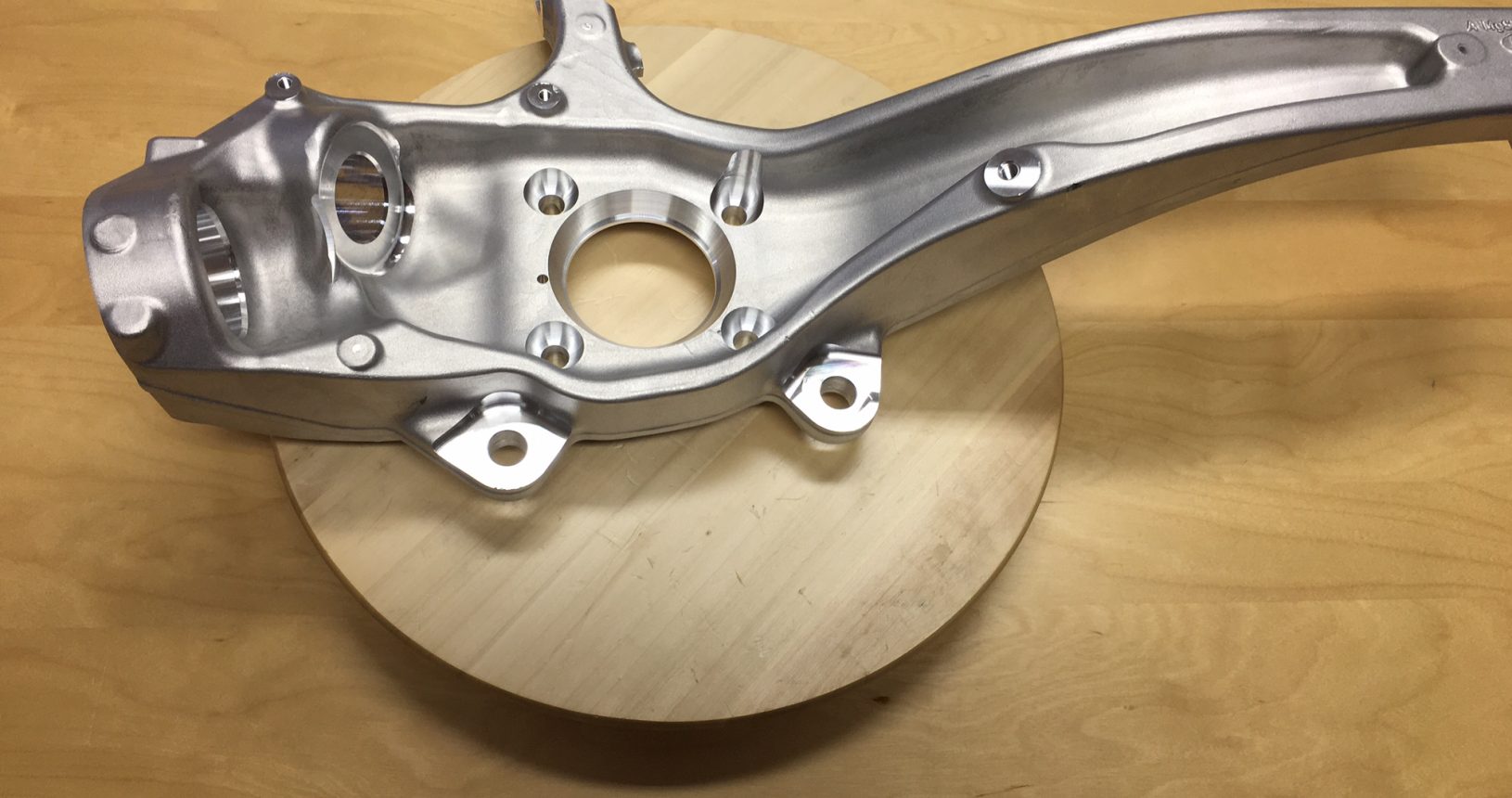
Schwenklagerwaschanlage

Draht

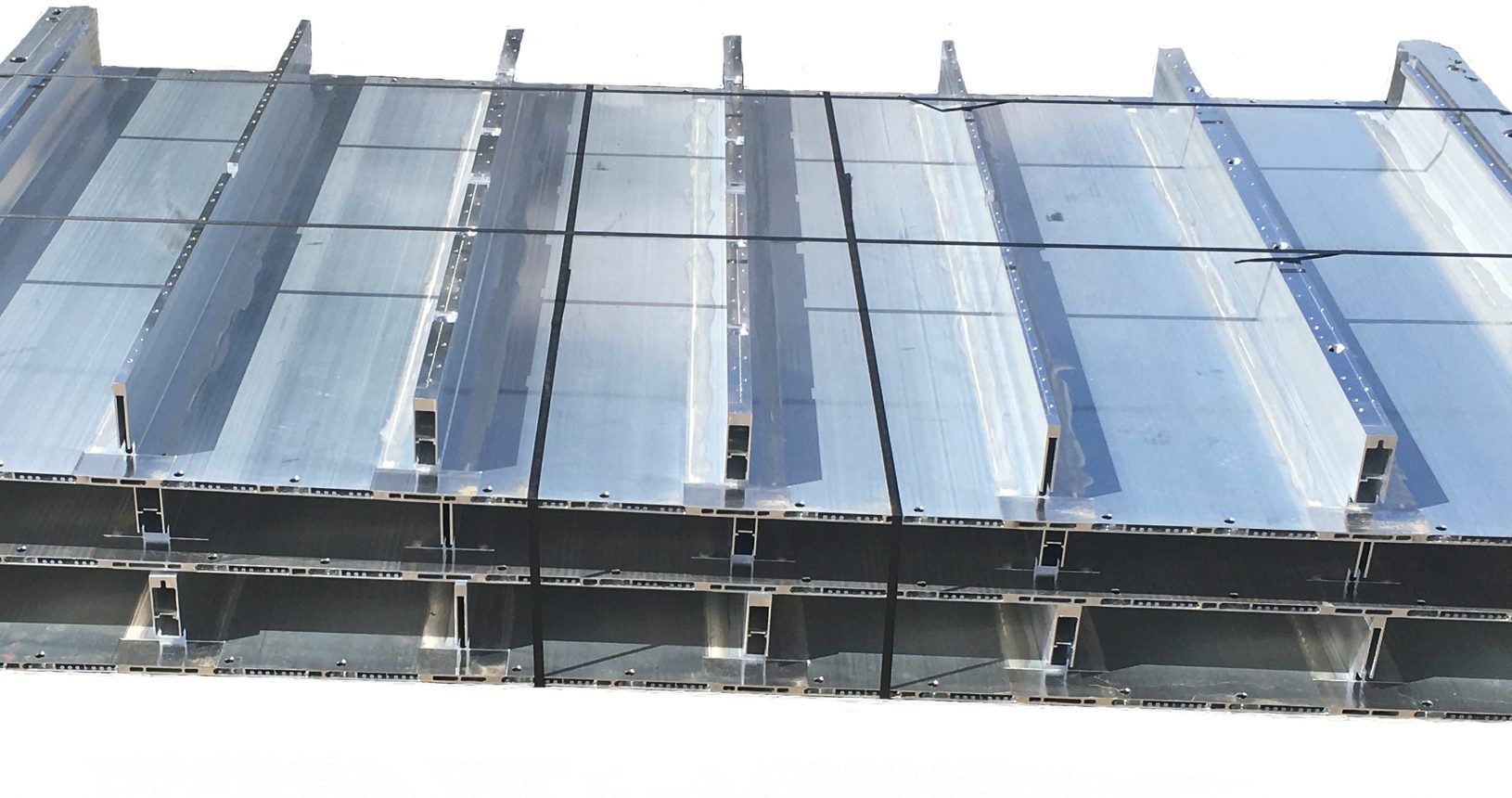
Profilschienen
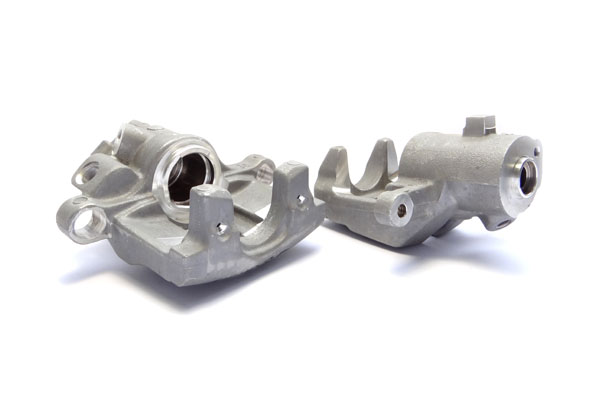
Bremssättel

Nockenwellen

Schwingungskompensatoren

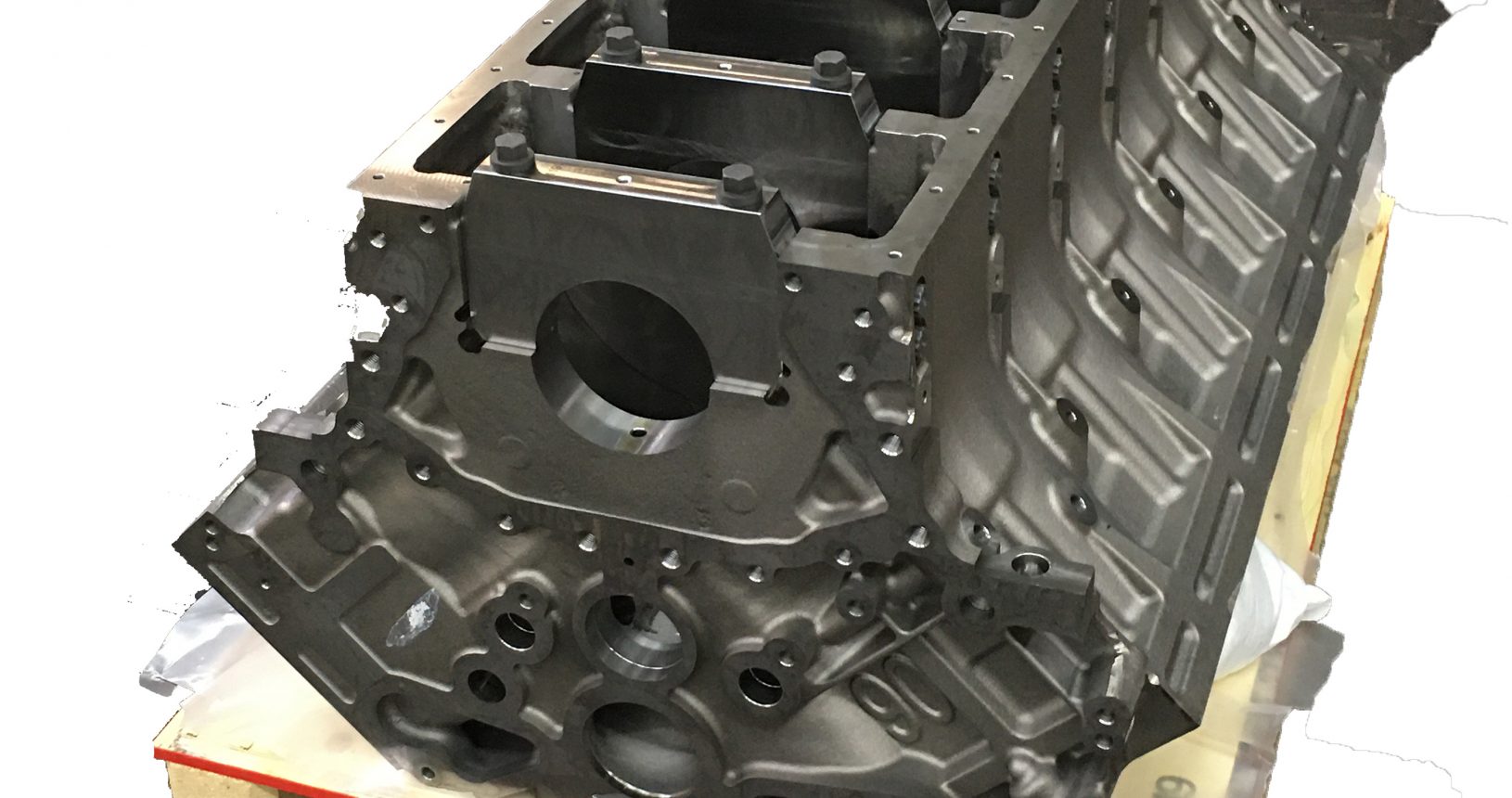
Kurbelgehäuse

Zahnräder
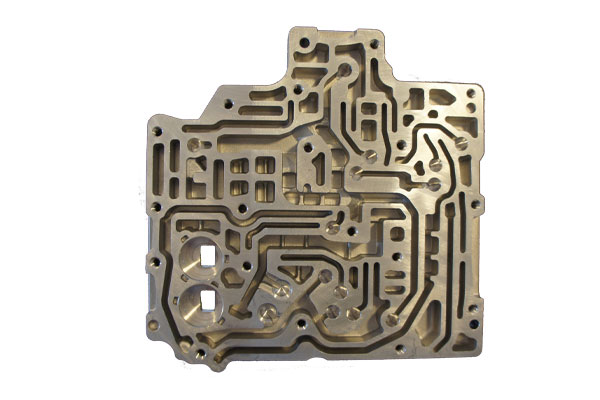
Steuerplatten
Kurbelgehäuse

Stapelkörbe

Kurbelwellen

Hauptbremszylinder

Großmotorenteile

Getriebewellen

Schüttgüter in Körben

{kind=link}